With the development of MEMS inertial devices, the accuracy of MEMS gyroscopes and MEMS accelerometers has gradually improved, leading to rapid advancements in the application of MEMS INS. However, the enhancement in the accuracy of MEMS inertial devices has not been sufficient to meet the increasingly high accuracy demands of MEMS INS. Thus, improving the accuracy of MEMS INS through error compensation algorithms and other methods has become a focus of MEMS INS research.
To enhance the performance of MEMS INS, researchers have explored various methods to reduce the errors in these systems. There are four main approaches to reducing MEMS INS errors:
- Calibration and Compensation of Sensor Error Parameters: This involves using mathematical modeling and experimental tools to stimulate sensor errors, systematically calibrating deterministic errors at the system level, and then compensating for these errors through inertial navigation algorithms to improve overall performance.
- Rotation Modulation Technology: By applying appropriate rotation modulation schemes, sensor errors can be made to vary periodically without relying on external information sources. This automatic error compensation in the navigation algorithm suppresses the influence of sensor errors on MEMS INS.
- Inertial Device Redundancy Technology: Due to the low cost of MEMS inertial sensors, redundancy designs can be implemented. Redundancy in sensors can effectively reduce the impact of random errors on MEMS INS, thereby enhancing performance.
- Incorporating External Information Sources: Using Kalman filtering for integrated navigation to suppress the accumulation of MEMS INS errors.
This article will further introduce the fourth method, which is the most practical and widely researched integrated navigation form— the GNSS/MEMS INS integrated navigation system.
Reasons for Using GNSS to Assist MEMS INS
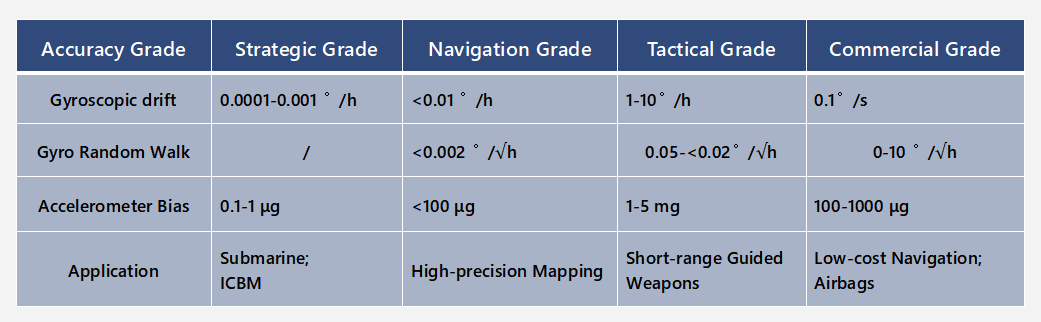
MEMS INS is a type of dead reckoning system that measures the relative state from the previous to the current sampling moment. It does not rely on acoustic, optical, or electrical signals for measurement, making it highly resistant to external interference and deception. Its autonomy and reliability make it a core navigation system for various carriers such as aircraft, ships, and vehicles. Fig.1 lists the performance of INS of different grades.
MEMS INS offers a high update rate and can output comprehensive state information, including position, speed, attitude, angular velocity, and acceleration, with high short-term navigation accuracy. However, MEMS INS requires additional information sources to initialize position, speed, and attitude, and its pure inertial navigation error accumulates over time, particularly in tactical and commercial-grade INS.
The GNSS/MEMS INS combination can realize the complementary advantages of both systems: GNSS provides stable long-term accuracy and can offer initial values for position and speed, correcting the accumulated errors in MEMS INS through filtering. Meanwhile, MEMS INS can enhance the update rate of GNSS navigation output, enrich the types of state information output, and assist in detecting and eliminating GNSS observation faults.
Basic Model of GNSS/MEMS INS Integrated Navigation
The basic model of GNSS/MEMS INS integration reflects the functional relationship between the observed information from sensors (IMU and receivers) and the carrier navigation parameters (position, speed, and attitude), as well as the types and random models of sensor measurement errors. The carrier's navigation parameters must be described in a specific reference coordinate system.
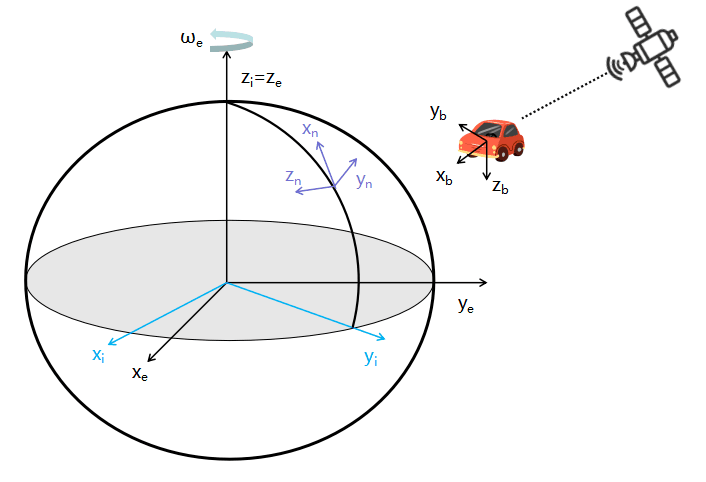
Navigation problems typically involve two or more coordinate systems: the inertial sensors measure the carrier's motion relative to inertial space, while the carrier's navigation parameters (position and speed) are usually described in an Earth-fixed coordinate system for intuitive understanding. Commonly used coordinate systems in GNSS/INS integrated navigation include the Earth-centered inertial coordinate system, the Earth-centered Earth-fixed coordinate system, the local geographic coordinate system, and the body coordinate system.
Currently, the algorithms for GNSS/MEMS INS integration in absolute navigation have matured, and many high-performance products have emerged on the market. For example, the three newly launched MEMS INS models by Ericco, shown in the image below, are suitable for applications in drones, flight recorders, intelligent unmanned vehicles, roadbed positioning and orientation, channel detection, unmanned surface vehicles, and underwater vehicles.
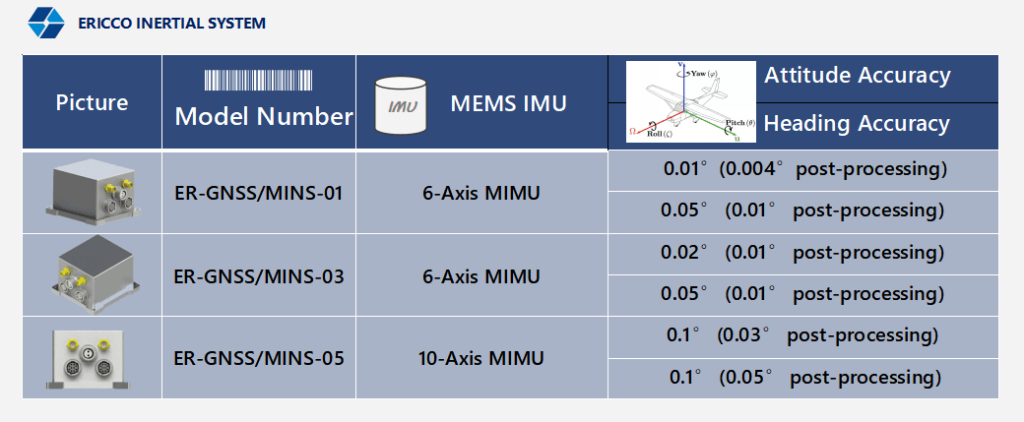
Fig.3 The Three Newly Launched GNSS/MEMS INS By Ericco
If you want more information about the INS, feel free to contact:
Mobile: +8613992884879
Email: info@ericcointernational.com
Wechat: 13992884879
More Technical Questions
1. What Is GNSS-aided MEMS INS and How Does It Work?
2. How to Improve the Performance of MEMS Inertial Navigation Systems?
3. Full-temperature Performance Optimization Method For MEMS accelerometer
4. Classification And Performance Improvement Of MEMS Gyroscope
5. MEMS Accelerometer Packaging Technology
6. Performance Analysis of GNSS RTK Timing
More Products