

MEMS gyroscope is widely used in various fields because of its advantages of low power consumption, light weight and low cost. High-precision MEMS gyro can improve the attitude measurement and control accuracy of many types of equipment and platforms, and is expected to solve the autonomous navigation problem of unmanned vehicles, drones and other equipment in complex environments, and has broad development prospects, so it is always one of the hot research directions in the field of inertia. The evolution of resonant structure of high precision MEMS gyro is described in this paper. The mass-block MEMS gyro and rotator-symmetric MEMS gyro are introduced.
Mass block MEMS gyroscope
1. Single-mass MEMS gyroscope
Based on the basic mass-spring dynamics model of MEMS gyro, it can be roughly divided into centralized mass block structure and distributed mass structure. The single mass mass structure is supported by the elastic structure, which is the most intuitive manifestation of the basic dynamic model. It is usually designed as a decoupled structure, such as the typical universal-joint micro-vibration structure, where a mass block is supported by two nested outer frames that can be twisted. As shown in Figure 1, when the gyro is working, the central mass block torsional vibrates along a fixed direction with a certain amplitude and frequency; When there is an angular velocity input, the Coriolis force will also vibrate in the other direction, and the amplitude of the vibration is proportional to the angular velocity input.
The gyro sensitivity can be improved by adjusting the structural parameters to increase the vibration displacement.
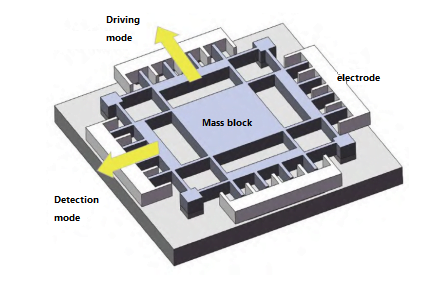
Figure 1 Typical MEMS gyro structure
2. Dual mass MEMS gyroscope
On the basis of the single-mass mass block structure, the resonant structure is designed as a mass block with two symmetrical modes, then a double-mass MEMS gyro sensor (also known as tuning fork gyroscope) is formed. The typical structure is shown in Figure 2. This design can solve the problem of center of mass deflection caused by structural vibration, effectively reduce the support loss, and make MEMS gyro have the potential of medium and high precision. Honeywell's latest report on the tuning fork type micro-electromechanical gyroscope zero-bias instability (the following are Allan variance) is 0.02°/h, the range is greater than 990°/s, and the scaling factor nonlinear is 13 ppm. The bias instability of the comb electrode structure gyroscope developed by Tronics company in France is 0.8°/h, the range is ±300°/s, and the scale factor nonlinearity is 230 ppm.
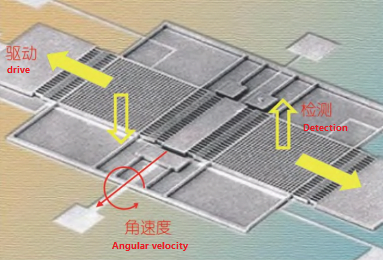
Figure 2 Typical high-precision dual-mass MEMS gyro structure
3. Four-mass MEMS gyro
In order to further increase the symmetry of mass block distribution, four-mass MEMS gyro has been further evolved on the basis of two-mass MEMS gyro, which is generally composed of four symmetrically distributed mass blocks connected through a beam structure, and its inertial mass and quality factor are further improved, so it has better sensitivity and mechanical thermal noise level.
Because of the symmetry of the structure, the four-mass MEMS gyro can work in frequency matching mode to improve the detection sensitivity. Asadian et al., University of California, Irvine, designed a four-mass MEMS gyro based on the inverse relative symmetric operating mode. The fulcrum is in force balance during operation, so the support loss is very small. At the same time, the thermoelastic damping of the structure can be reduced by reducing the resonant frequency and wall thickness, and the quality factor can be close to 2×106. In rate integration mode, the zero bias instability of the gyroscope is 0.2°/h, the Angle random travel is 0.02°/h1/2, and the range can exceed 1000°/s. In the force feedback mode, the angular random walk is 0.015°/h1/2, and the zero-bias instability is 0.09°/h. Tsinghua University designed a four-mass MEMS gyro supported by a cross beam (FIG. 3). The adjacent mass blocks are connected to each other by a bent flexible beam. The working detection modes are symmetrical, and the Q value is 16000. The zero-bias instability is 0.12°/h and the angular random walk is 0.012°/h1/2.
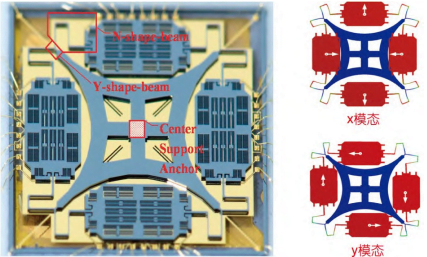
Figure 3 Typical four-mass MEMS gyro structure and operating modes
The four-mass MEMS gyro can also work in the asymmetric drive detection mode, which also shows better performance. Sensonor has developed a sphenowing microelectromechanical gyroscope based on the four-mass resonant structure of the IMEGO Institute, as shown in Figure 4(a). Its latest STIM300 series products have a measuring range of ±400°/s, zero bias instability of 0.5°/h at room temperature, and good zero bias temperature sensitivity (0.08°/h/°C) and scale factor nonlinear (15 ppm). National University of Defense Technology has optimized the sensitive structure of the spidey-wing silicon micro gyro, as shown in Figure 4(b). The machining error is effectively reduced by the full pre-burial process, and the precise machining of the silicon inclined beam is realized. At the same time, the thermal stress deformation and packaging stress in gyro machining are effectively reduced by stress release and equilibrium structure. The zero bias instability is 0.19°/h, the scale range is ±200°/s, and the scale factor nonlinearity is 89.6 ppm.
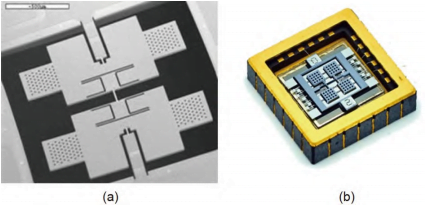
Figure. 4 Structure of sphenowing microelectromechanical gyroscope
Rotary symmetric MEMS gyroscope
1. Two-dimensional ring MEMS gyros
A MEMS gyro sensor with a rotationally symmetric structure is formed by discretely distributing the mass blocks along the circumference. It is geometrically symmetric in rotation axis, generally works in matching modes, and has high Q value, thus having better precision potential. Since the 1990s, the University of Michigan began to study the theoretical modeling, materials and processes of relatively simple single-ring micro-electromechanical gyroscope, laying a foundation for the development of ring MEMS gyroscope. At present, Silicon Sensing company's electromagnetic ring gyroscope is widely used in ring MEMS gyro. The CRH02 series products have zero bias instability of 0.12°/h and measuring range of ±400°/s. The silicon ring vibration supported by Z-beam is stimulated by electromagnetic excitation, which has good shock vibration resistance. The latest CRH03 series products achieve bias instability of 0.03°/h, but the range is relatively small. However, the effective vibration mass of a single resonant ring is small, and there is still a problem of large mechanical thermal noise. In order to improve the performance potential of ring MEMS, Boeing Company and JPL jointly proposed a disc-shaped MEMS gyro scheme composed of multiple rings nested, as shown in FIG. 5, with a diameter of about 8 mm. The concentric rings are connected by radial beams, and the different rings can be driven, detected, or stiffness adjusted by internal electrodes. This kind of disk structure has a larger equivalent mass and drive detection capacitance area, the detection sensitivity and signal-to-noise ratio of the gyro are effectively improved, and the mechanical thermal noise can be reduced to a very low level through structural optimization design. The disk MEMS gyro designed by Adno Semiconductor (AD) and Stanford University has zero bias instability of 0.2°/h after frequency matching, but has large damping mismatch. In recent years, the research of disk MEMS gyro in many research institutions in the United States has made rapid progress. The zero-bias instability of the prototype under temperature control can reach up to 0.01°/h, which confirms the precision potential of navigation level and has met the requirements of north finding applications.
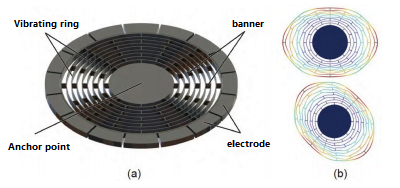
Figure 5 Typical structure and operating modes of high precision ring MEMS gyro
2. Three-dimensional micro-hemispherical resonator gyro
The micro-hemisphere gyro is evolved from the traditional hemispherical resonator gyro, and can also be considered as the expansion of MEMS gyro from two-dimensional structure to three-dimensional structure. It inherits the excellent characteristics of hemispherical resonator gyro with high quality factor, so it has extremely high precision potential, and is one of the most popular research directions of high-precision MEMS gyro at present. In recent years, under the promotion of the United States Department of Defense Advanced Research Projects Agency (DARPA), the University of California, the University of Michigan and Georgia Institute of Technology, Draper Laboratory and other research institutions have carried out the exploration of micro-hemisphere gyro, the main structural forms include hemispherical structure, basin structure, wine glass structure and so on.
At present, high-precision microhemispherical resonant structures are mainly manufactured by glass blowing method, which was first proposed by the University of Michigan. The forming process is shown in Figure 6. Non-newtonian fluid deformation is generated in the fused quartz glass sheet at high temperature, and then the pressure difference between the upper and lower surfaces of the sheet structure is generated through the vacuum suction device, and the curved shell with a diameter of 5-10 mm is formed. This processing technology not only has high efficiency, but also avoids the subsurface damage caused by traditional mechanical grinding and polishing, the surface roughness is better than 1 nm, and the quality factor of uncoated resonant structure can reach more than 9×106. Gyroscopic zero-bias instability was reported to reach 0.0014°/h in 2020, showing great accuracy potential.
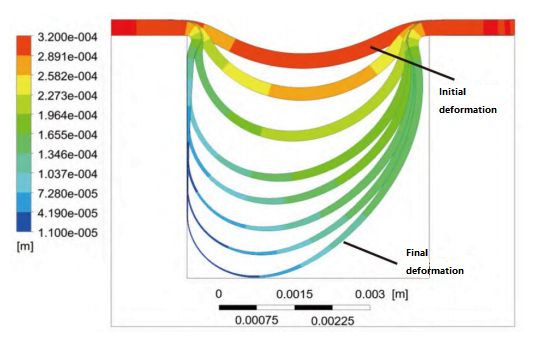
Figure 6. Typical forming process of microhemispherical resonant structure
Conclusion
This paper focuses on the structure evolution of high-precision MEMS gyro. In terms of the resonant structure evolution of high-precision MEMS gyro, two-mass, four-mass, ring MEMS gyro and micro-hemispherical resonator gyro have been reported to have better performance, some products have been better than the tactical level accuracy index, and a few have been close to the navigation level accuracy threshold. With the application of topology optimization design, new materials and new processes, the structural innovation of MEMS gyro is still worth looking forward to. At the same time, we can pay attention to the ER-MG-067 tactical MEMS gyroscope, which uses a single mass block structure, its zero bias stability can reach 3°/hr, and the angular velocity random walk is 0.125°/√hr. In high-precision fields such as drones, navigation grade MEMS gyroscope is needed, such as ER-MG2-50/100, whose zero-bias instability can reach 0.01-0.02°/hr, and angular velocity random walk can reach 0.0025-0.005°/√hr.
If you are interested in the knowledge of MEMS gyro, please contact us.
More Technical Questions
1.Integrated method of three-axis MEMS gyroscope
2.Development history of MEMS gyroscope
3.MEMS gyroscope processing technology
4.Research on driving mode of MEMS gyroscope
5.Stochastic error modeling method of MEMS gyroscope
6.Signal Denoising Principle And Evaluation Index of MEMS Gyroscope
Products in Article

High precison MEMS Gyroscope




High Precision Stable-Control MEMS IMU