

As an instrument to measure the Angle between north and true north, North finder can provide accurate orientation and attitude information in the static base environment, and plays an important role in mining, oil logging, ship equipment, tunnel penetration and other fields. Nowadays, all walks of life have higher and higher requirements for the size and accuracy of the north seeker, so the north seeker is more high-precision and miniaturized.
Originally, I will start from the basic point of view, focusing on the composition of the north seeking system, so that everyone can understand the north finder more clearly.
The basic components of the north seeker
The MEMS north finder can provide heading information to the moving body in a fully autonomous manner, working without relying on satellites, not affected by climate, and not requiring complex operations. It not only provides the data output interface for the computer, but also provides a good man-machine interface.
The MEMS North finder is mainly composed of the inertial measurement module (IMU) and the line part, and the hardware block diagram is shown in Figure 1. Inertial measurement unit (IMU) is composed of gyroscope and rotary mechanism. The circuit part is mainly composed of four circuit boards, including: power board, control board, power amplifier board and base plate. Table 1 shows the components of the north seeking system.
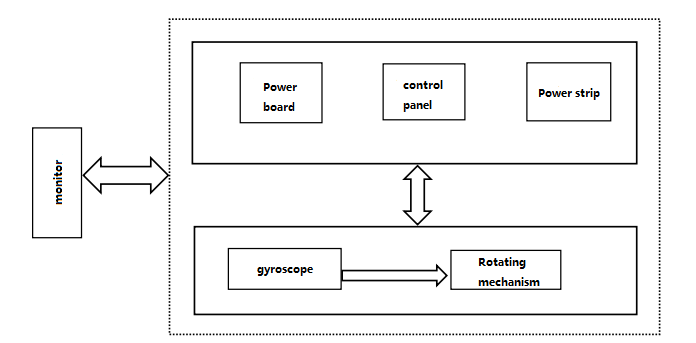
Figure 1 Hardware block diagram of the north seeker
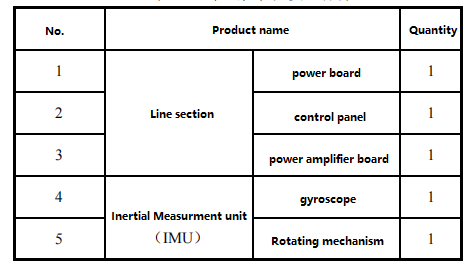
Table 1 Components of the North seeker
There are two indicators on the panel of the MEMS north finder: north seeker indicator and power supply indicator; Two buttons: north button and power switch; A five-digit seven-segment digital display; A fuse; The device is externally connected with two connectors: a power socket and a communication interface socket.
The North finder is composed of inertial measurement units and algorithms, which is the same principle as the inertial navigation system, the difference is that different algorithms form different systems. Therefore, the north seeking system is also an inertial navigation system.
Inertial navigation system can measure position information, instantaneous velocity and acceleration and angular velocity through inertial measurement components without interference from external environment, without radiation and in secret, and can continuously provide position, attitude Angle, linear velocity, angular velocity and other parameter information in aviation, aerospace, navigation and military fields.
The basic principle of inertial navigation is shown in Figure 2. The coordinate system shown in the figure is oxy, where (x,y) is the instantaneous position. On the platform of an inertial navigation system, the speed Vx, Vy and the instantaneous position x and y are obtained through computer calculation, where the x axis and y axis control the measurement axes of two accelerometers respectively, and the accelerometer is used to measure the acceleration of the two axes.
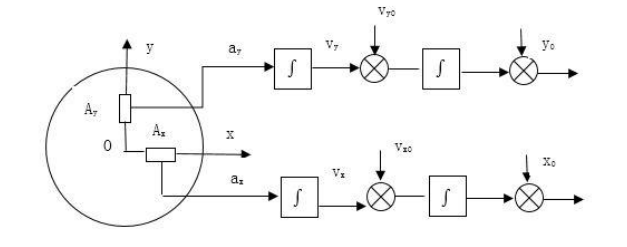
Figure 2 Basic principle of inertial navigation
In the inertial navigation system, the Earth's surface is considered spherical, then the vector position is represented by the longitude and latitude and, if the x and y axes point north and east respectively, the vector position is represented by the longitude and latitude:
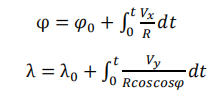
Where R is the radius of the earth; φ0 - initial latitude of the carrier; λ0 - initial longitude of the carrier;
φ - geographical latitude position of the carrier; λ - the geographical longitude position of the carrier;
vx - northbound speed; vy - eastbound speed.
An inertial measurement unit, also called an inertial navigation unit, consists of an accelerometer and a gyroscope. The inertial navigation system consists of three parts, including the inertial measurement unit, the computer and the display. The acceleration of the aircraft moving in three directions, transverse, longitudinal and vertical, is measured by three accelerometers, and the rotation of the aircraft in three directions, longitudinal and vertical, is measured by the gyroscope with three degrees of freedom. The computer calculates the plane's speed and position; All kinds of navigation information data are displayed by the display.
Conclusion
Most of the north finder is a cube shape, but with the increasing demand of various industries, the appearance of the north seeker also changes. For example, the ER-MNS-09 is a north seeker designed for petroleum logging, directional drilling and mining, and its shape has made a big breakthrough, evolving from a cube to a cylinder, which can be well adapted to the shape of the probe. Since it is a MEMS north seeker, it contains a three-axis MEMS gyroscope and a three-axis MEMS accelerometer.
I hope that through this article you can understand the structure of high-precision miniaturized MEMS north finder, if you are interested in more knowledge of north seeker, please contact us.
More Technical Questions
1.Technical innovation of north finder in directional drilling
2.Effective combination of MEMS technology and north seeker
3.Research on orthogonal monitoring technology of north finder
4.Modeling and filtering in signals collected by FOG north seekers
5.Error Modeling and Compensation Analysis of North Finder Based on FFT
6.Research and use of north finder for mining drilling rigs
Products in Article
 MEMS Triaxial North Seeker for Mining
MEMS Triaxial North Seeker for Mining

 Low Cost 3 Axis FOG North Seeker
Low Cost 3 Axis FOG North Seeker High Performance North Seeking MEMS Gyroscope
High Performance North Seeking MEMS Gyroscope High Performance Navigation Grade MEMS Gyroscope
High Performance Navigation Grade MEMS Gyroscope