

North seeker is widely used in military and civil orientation. It can determine the north in static all-weather, all-round, fast and real-time, so as to determine the carrier azimuth, that is, the Angle between a reference axis of the carrier and the true north direction, to be used as the azimuth reference for observation, target targeting and navigation system reset, and also as the azimuth reference for underground operations such as tunnels and mines. In military applications, gyroscopic north seeker is especially required to achieve fast and accurate orientation in a short period of time. However, due to the influence of environmental interference factors such as wind gust, vehicle engine operation, human movement and temperature change, the output of gyroscope contains not only useful signals of earth rotation, but also drift signals of different components, which will seriously affect the orientation accuracy of the system. Therefore, effectively eliminating gyro drift is the key to ensure the precision of north seeking.
For random drift that can not be compensated by simple methods, most of the filtering methods are used to remove the interference noise. The traditional denoising methods are mostly linear filtering, which not only removes the noise, but also makes the abrupt point of the signal fuzzy. The median filtering method is a nonlinear processing method, which can ensure the satisfactory recovery of the signal's mutation point under certain conditions, but the median filtering only has a good filtering effect on pulse noise, while the suppression ability of random noise is not ideal. In order to overcome the low universality of traditional denoising methods, a denoising method based on wavelet transform is proposed. The wavelet threshold denoising method is widely used in the wavelet domain, which is suitable for the analysis of signals with low frequency and high frequency at the same time, but it is only suitable for white noise and broadband noise, and it is powerless for pulse noise.
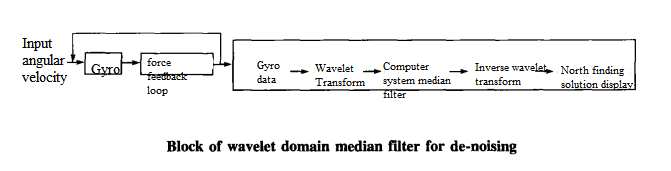
In order to better remove the noise in the gyro signal, we use the threshold method in the wavelet domain to filter out the white noise in the gyro signal, and use median filtering to filter out the impulse noise in the signal. The results of north-seeking experiments show that this method is effective and feasible in removing this kind of noise.
1.Wavelet threshold denoising
1.1Orthogonal wavelet transform
If f(k) is the discrete sampling value of the signal at point K, and f(k)=C, then the decomposition formula of orthogonal wavelet transform f according to Mallat's wavelet decomposition tower algorithm is as follows:
![]()
Formula: cj,k is the scale coefficient; dj,k is the wavelet coefficient; h,g is a pair of orthogonal mirror filters; j is the number of decomposition scales; N is the number of sampling points.
The reconstruction process of orthogonal wavelet transform is the inverse process of decomposition process, and its reconstruction formula is
![]()
1.2 Wavelet threshold denoising method
Suppose there is a signal f(i) whose expression is
Since the wavelet transform is linear, the wavelet coefficient model of the signal after the wavelet transform can be written as
![]()
The wavelet threshold denoising method is specifically described as follows: first set a threshold value (obtained by prior knowledge), the wavelet coefficient greater than this threshold is considered to be generated by noise, remove the coefficient generated by noise and then perform wavelet inverse conversion to obtain the denoised signal. The hard threshold function used in this paper is

2.Wavelet domain value filter design
The following filters can be used for scale coefficients
It can be seen that its form is similar to the Lee filter, where Ajf(i) is the scale coefficient of signal F (the I-th point of scale J);
Med[Ajf(i-n),...Ajf(i),...Ajf(i+n)]is the median value of Ajf(i),2n+1 is the width of the median filter window and is the local mean of the scale coefficient.
3.Conclusion
Due to the subsampling characteristic of orthogonal wavelet transform, the median filter of smaller window can remove the pulse noise of larger window. The filter is applied to the denoising of the gyroscope signal, and a good denoising effect is obtained, and the precision of the north seeker is increased by 20%. It can be seen that Ericco has always maintained the spirit of exploration in improving the accuracy of inertial products. At present, our FOG north seeker model is ER-FNS-03. Considering the factors such as the large size of optical fiber north seeker, we have also manufactured MEMS north seeker ER-MNS-05 and ER-MNS-06 with MEMS technology as the core. In the country and even the world has the volume and technical advantages, if you are interested in our products, you are welcome to understand the specific parameters of the product.
More Technical Questions
1.Technical analysis of MEMS direction alignment instrument for mining
2.Research on downhole north seeker
3.Research on orthogonal monitoring technology of north finder
4.Modeling and filtering in signals collected by FOG north seekers
5.Error Modeling and Compensation Analysis of North Finder Based on FFT
6.Research and use of north finder for mining drilling rigs
Products in Article





