Intelligent connected vehicles encompass automobiles equipped with advanced communication and computing technologies, aiming to elevate safety, efficiency, and the overall driving experience. A pivotal component enabling the safe operation of smart grid-connected vehicles lies in the capability of the vehicle's automatic driving system to acquire real-time, stable, high-precision positioning and associated motion status information. This data encompasses critical parameters such as latitude, longitude, speed, acceleration, orientation angle, attitude angle, and more. Failure to accurately obtain these details in a timely manner prompts the vehicle to exit automatic driving mode, necessitating dynamic takeover by the driver. This paper explains the principle of GNSS-RTK technology and its main application in ICVs, and also analyzes the future of RTK in ICVs.
Currently, high-precision positioning algorithms based on Global Navigation Satellite System (GNSS) include position difference, pseudo-distance difference, carrier phase smoothing pseudo-distance difference, and Real-Time Kinematic (RTK). The accuracy of these differential positioning techniques improves progressively in the stated order. GNSS-RTK technology, boasting superior relative positioning accuracy, facilitates simultaneous 3-D coordinate monitoring. Widely adopted, it plays a crucial role in the field of intelligent networked vehicle testing, specifically in coordinating and monitoring vehicle coordinates.
1. The working principle
GNSS-RTK positioning technology is a method of real-time dynamic processing and solving the carrier phase observations measured by two satellite stations for positioning, i.e., the carrier phase collected by the reference station is sent to the user's receiver, and the carrier phase observations of the user and the reference station are differenced to solve the coordinates. As most of the errors of the user and the reference station (caused by the ionosphere and troposphere, caused by the clock, etc.) have time and space correlation, most of the errors can be offset or reduced, in the case of the two are not far from each other, RTK carrier phase difference can make the positioning accuracy of centimeter level.
The basic observation equation of carrier phase:
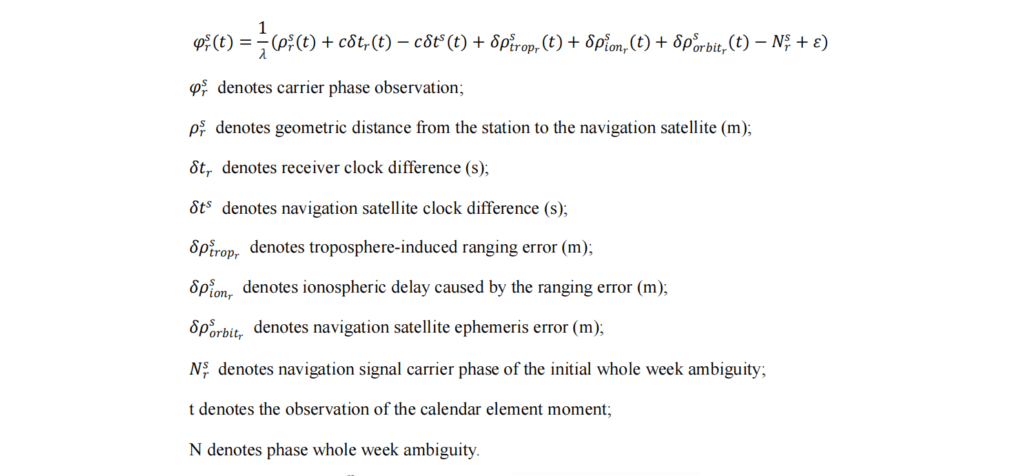
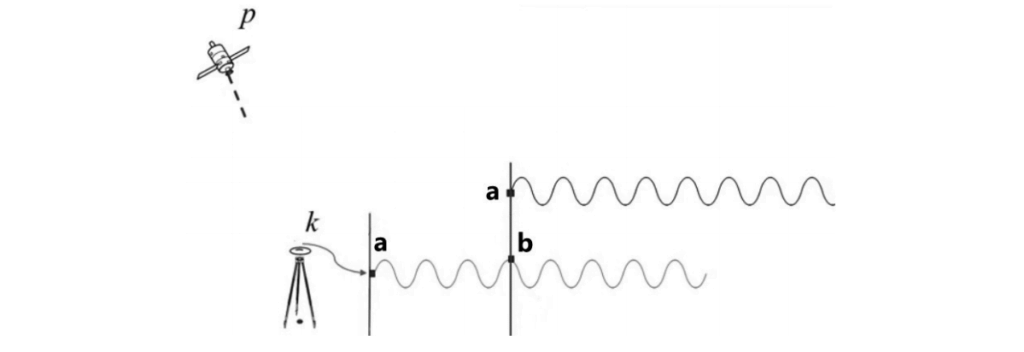
Assuming that the navigation satellite transmits a carrier wave at phase a, and when it arrives at the observation station, the carrier wave phase measured by the observation station is b. Comparing phase a and phase b, the carrier wave phase difference is obtained, but this phase difference is not a complete signal waveform cycle, and there may be more than one integer cycle N in the middle, i.e., the phase whole-week fuzzy degree. The phase perimeter ambiguity can be determined by pseudorange method, Doppler method, FARA method, Kalman filter method, LAMBDA method, etc. After N is determined, combined with the basic observation equation of the carrier phase, the observation value of the station on the navigation satellite can be obtained as follows:
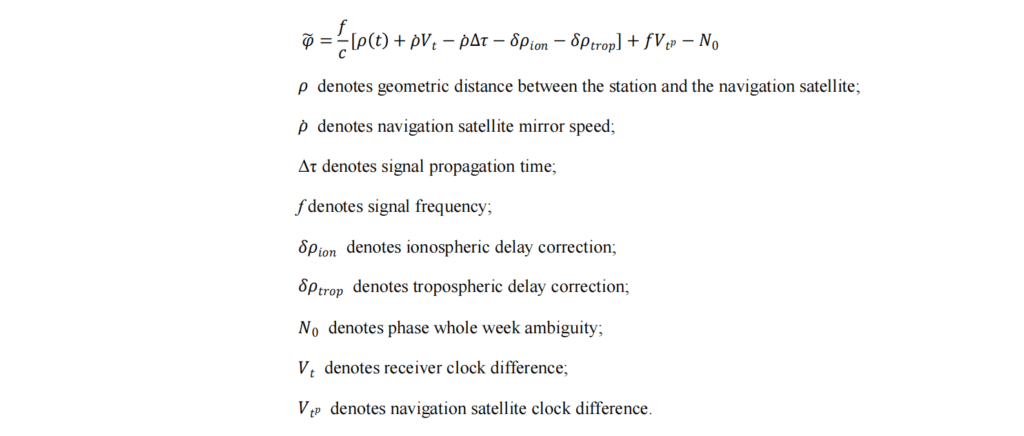
With a station A, B, respectively, on the I navigation satellite observation, then according to the above formula to find A, B station observation value and do the difference, that is, the difference between the stations:

If the coordinates of station A are precisely known at this time, it is called the reference station; the coordinates of station B are to be sought, it is called the mobile station. By making a difference between the carrier phase observations of A and B, the satellite clock difference can be eliminated, and the refractive influence of the ionosphere and troposphere can be weakened. By solving the difference equation, more accurate baseline coordinates can be obtained. The baseline is the vector with the reference station coordinates as the starting point and the mobile station as the end point, which is added to the precise coordinates of the reference station A to get the precise coordinates of the mobile station B.
In practical engineering applications, if you need to further improve the differential positioning accuracy, you can carry out double differential between stations and stars or triple differential between stations, stars and calendar elements.
2.The main application of GNSS-RTK technology
2.1 High-precision Positioning
GNSS-RTK technology enables ICVs to determine their precise location with high accuracy. This is crucial for applications like lane-keeping assistance, precise navigation, and autonomous driving. Centimeter-level accuracy is essential for ensuring the vehicle stays within its designated lane and follows the correct path. ICVs rely on accurate mapping and localization for effective navigation and decision-making. Additionally, the technology also contributes to creating detailed maps and helps vehicles localize themselves within these maps accurately. This is especially important for autonomous vehicles to understand their position relative to the mapped environment.
2.2 Traffic Management
GNSS-RTK technology assists in dynamic routing by providing real-time, accurate location information. Vehicles can receive up-to-date traffic conditions and adjust their routes accordingly. This contributes to efficient traffic management and helps in avoiding congestion. Beyond driving applications, this skill is also useful for surveying and data collection tasks related to transportation infrastructure. ICVs equipped with this technology can contribute to building accurate maps, monitoring road conditions, and collecting data for urban planning.
2.3 V2X Communication Support
In the context of Intelligent Connected Vehicles, GNSS-RTK plays a role in supporting Vehicle-to-Everything (V2X) communication. Accurate positioning information is crucial when vehicles communicate with each other and with the surrounding infrastructure. This communication enhances safety by sharing real-time data about the vehicle's location, speed, and intentions.
3. Future of RTK
The landscape of intelligent networked vehicle testing is characterized by diverse positioning solutions tailored to different environments and specific needs. While the GNSS-RTK solution stands out as a fundamental positioning method, its optimal application is in outdoor environments due to the limitations of GNSS in areas like tunnels or underground parking lots. In scenarios where signal shielding is a concern, such as tunnels or underground parking lots, GNSS-RTK is commonly integrated with inertial guidance to enhance positioning stability and adaptability to specific environments.
Recognizing that a single technology, be it RTK or on-board sensors, cannot unilaterally ensure high-precision positioning in all environments, the future of high-precision positioning technology for smart connected vehicles is trending towards the fusion of multiple positioning technologies. This approach allows for complementary strengths, and the integration of data from various sensors, including inertial sensors (IMUs), LIDAR, radar, and cameras, offers a more comprehensive and robust positioning solution.
A notable example of this trend is the availability of the ER-PB-07 board, which integrates RTK technology and incorporates a built-in 9-axis IMU to facilitate comprehensive vehicle navigation. The utilization of sensor fusion algorithms effectively amalgamates data from diverse sources, ensuring precise positioning even in challenging situations where GNSS signals may encounter interference. This multi-faceted approach represents a significant stride towards achieving resilient and accurate positioning for smart connected vehicles across varied environmental conditions.
4. Conclusion
High-precision positioning technology stands as a crucial cornerstone supporting the evolution of intelligent connected vehicles and intelligent transportation. As the landscape of intelligent networked vehicle testing progresses from advanced assisted driving to autonomous driving and vehicle-circuit coordination, the demands on positioning performance evolve concerning reliability, time delay, movement speed, communication range, and positioning accuracy.
Looking forward, the future advancement of high-precision positioning technology hinges on extensive integration and research across diverse disciplines. The collaborative exploration of multidisciplinary technologies, spanning communication, electronics, optics, physics, and beyond, promises to be a catalyst in propelling the field forward. This concerted effort is poised to contribute significantly to the ongoing progress of high-precision positioning technology, ensuring its continued relevance and effectiveness in the dynamic realm of intelligent connected vehicles.
I will appreciate it if you find this article helps you a lot. For more information about GNSS products, you may read the articles and products below. Always feel free to contact us:
Email: info@ericcointernational.com
More Technical Questions
1. Integration of GNSS Modules in Aviation: Precision Navigation for Unmanned Aerial Vehicles (UAVs)
2. Decoding Navigation Technology: GNSS Boards vs. GNSS Modules – Unveiling the Distinctions
3. Distinctions Between GNSS Receivers and Antennas
4. Equipment Used in GNSS: Navigating Precision and Accuracy
5. How to select a GNSS antenna?
6. Some Questions about GNSS Antennas
Products in Article